
Expérience 2 : le robot
Présentation
Notre seconde expérience consiste en la fabrication d’un robot simple qui reproduit le moyen de localisation de la chauve-souris.
Ainsi nous reprenons d’une part ce sens des chauves-souris créé pas la nature et l’illustrons, et d’autre part les principes physiques exploités par cette technique, puisque nous recréons entièrement ce système nous-mêmes.
Ce robot et cette partie seront le thème majeur de l'oral et y seront donc exposés de manière précise et détaillée. Vous pouvez lire ici le compte rendu simplifié de cette expérience.
Explication
Pour simplifier, le robot ne se déplace que sur deux axes : il ne vole pas. C’est un robot qui se déplace au sol grâce à deux roues motorisées indépendantes. Ces deux roues, ainsi que l’intégralité du robot, sont contrôlés par un système autonome : une carte Arduino.
Une carte Arduino est un outil électronique programmable qui peut contrôler des périphériques.
Le robot est composé de plusieurs éléments pour modéliser la chauve - souris :
- Le module à ultrasons vu dans la partie précédente modélise les cordes vocales et les oreilles de la chauve-souris.
- Les moteurs et roues modélisent le moyen de déplacement de la chauve-souris.
- La carte Arduino commande tous les éléments, elle modélise le cerveau de la chauve-souris.
- Le châssis contient tous les composants.
Fonctionnement basique
Une version simplifiée du fonctionnement du robot serait la suivante : le robot détecte des obstacles contre lesquels il pourrait potentiellement se heurter en mesurant la distance qui l’en sépare grâce à des ultrasons. Il réagit en conséquence et change de direction lorsqu’il détecte un tel objet.
Illustration
Voici ci-dessous des images dudit robot :
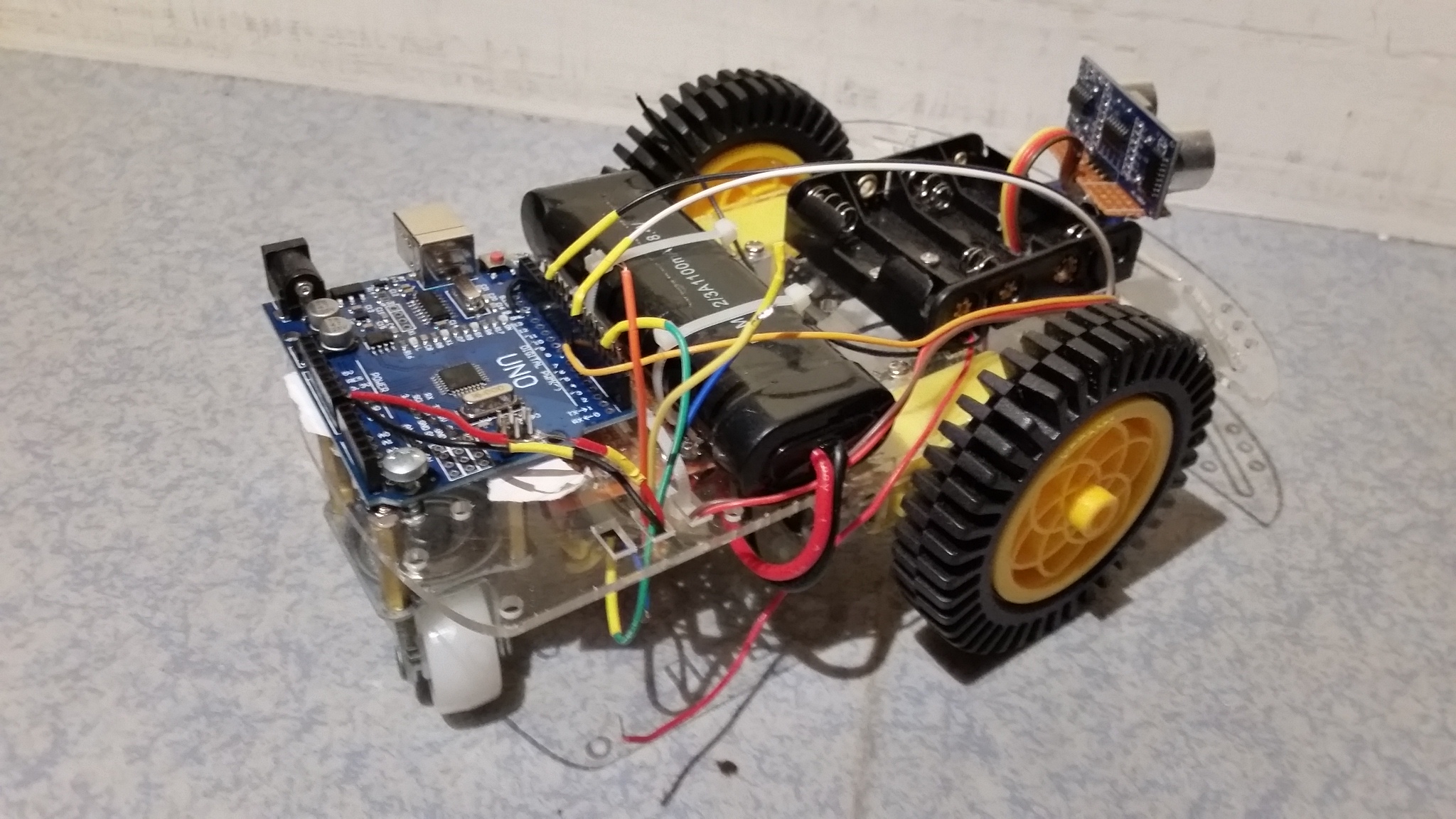
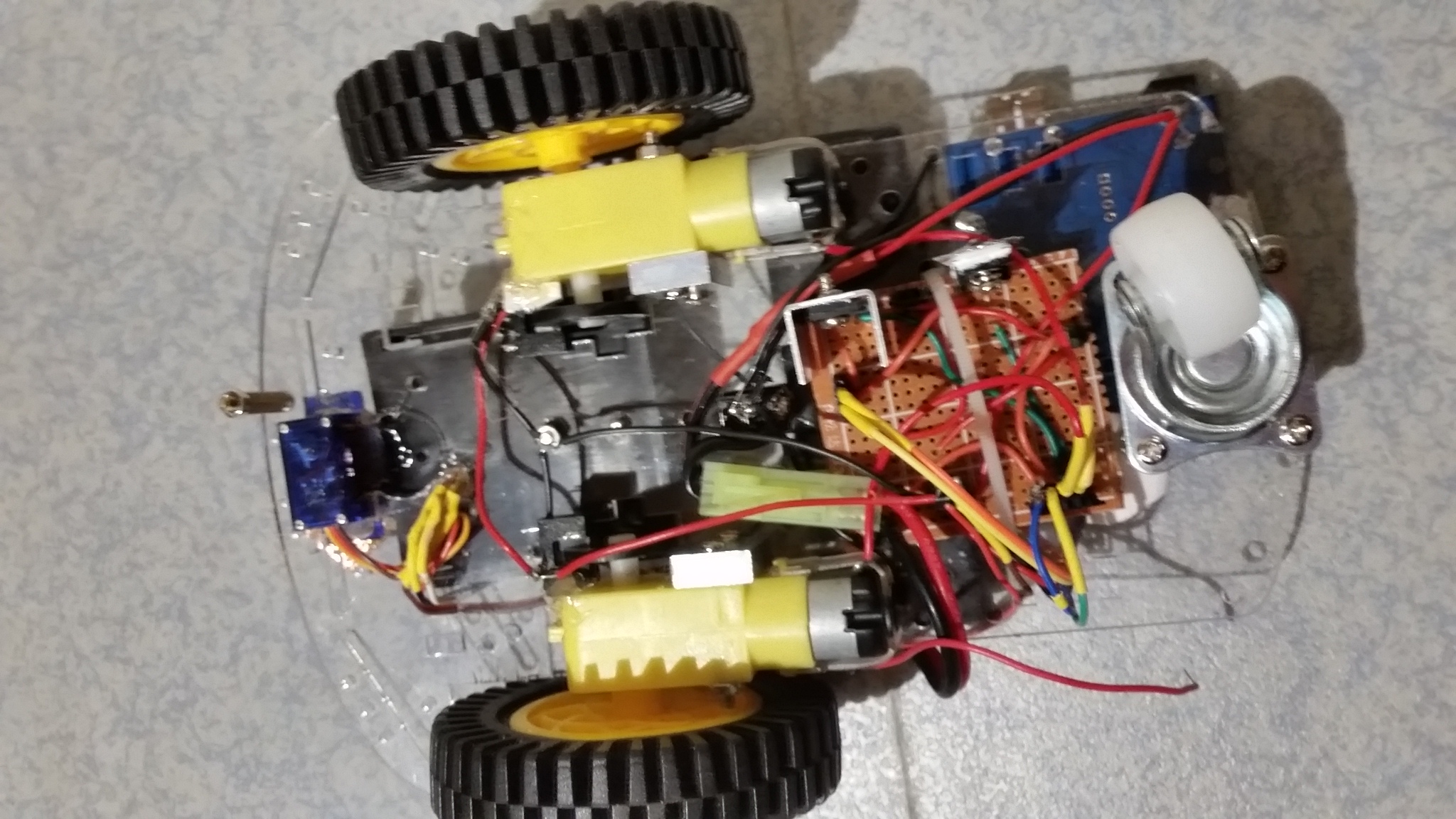
Vue générale du robot
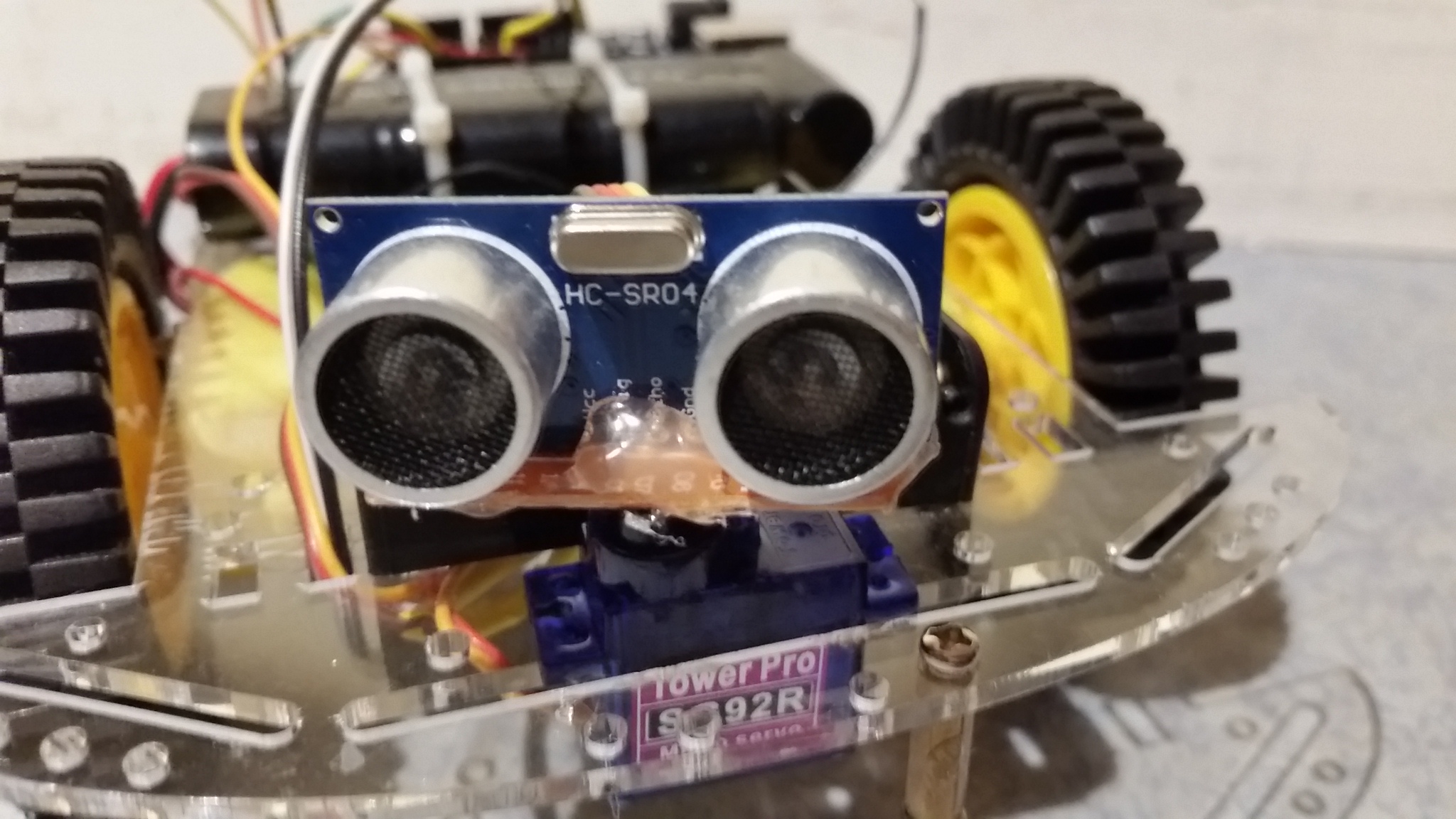
Le module HC-SR04 monté sur le robot
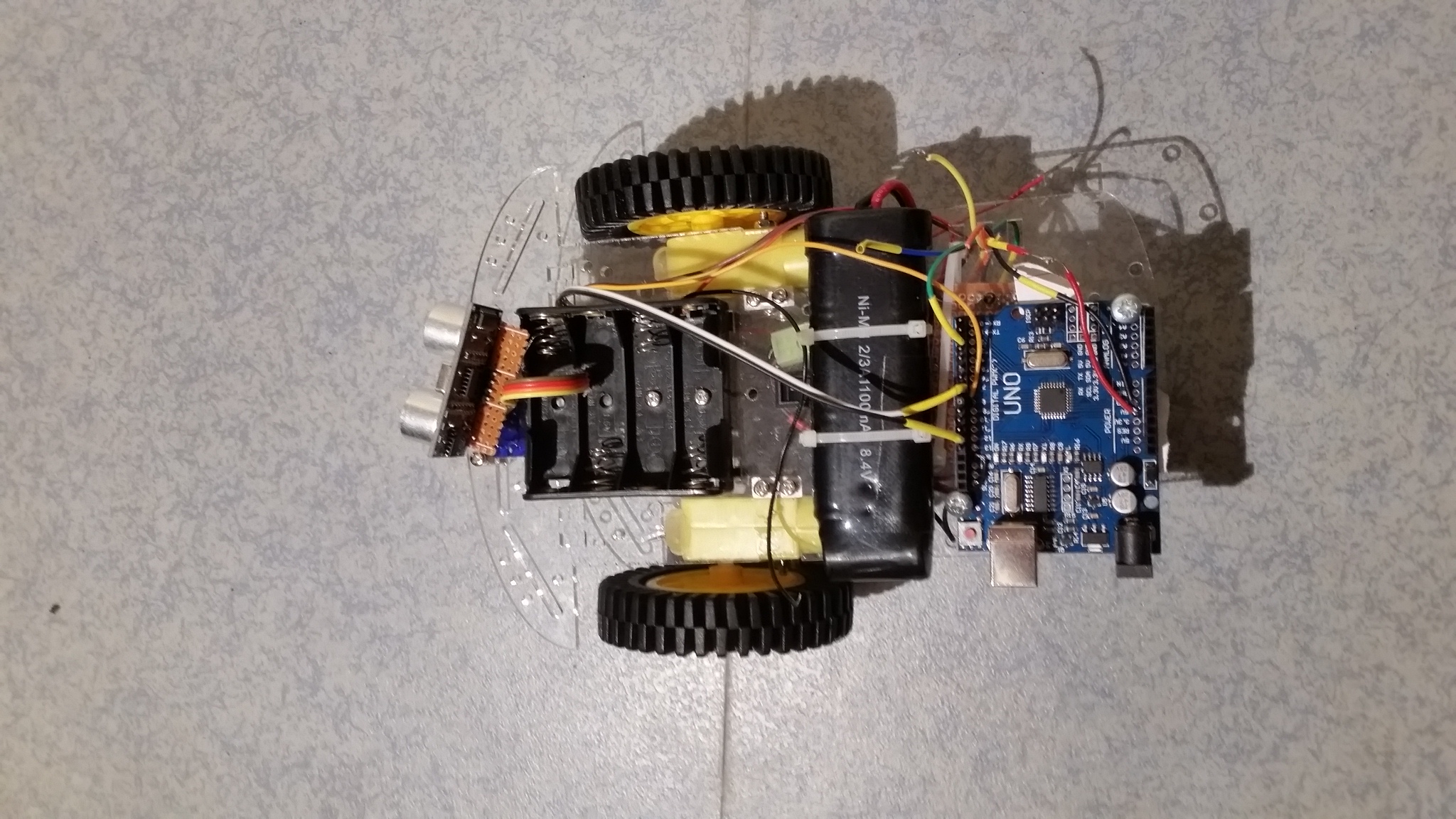
Vue de l'organication générale des composants sur le robot
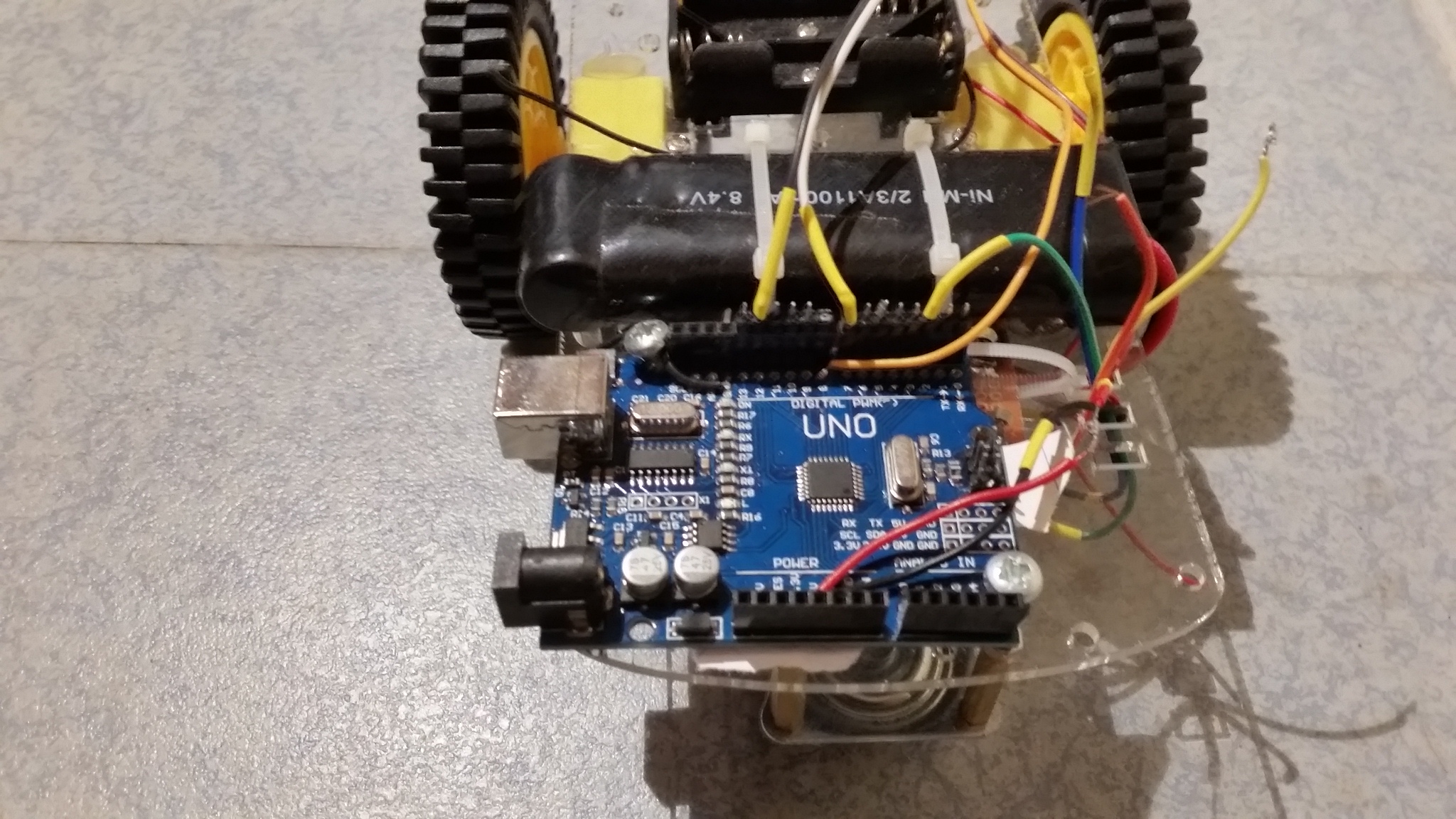
La carte Arduino UNO
Montage du protocole 1, avec les émetteur et récepteur à 34cm l'un de l'autre
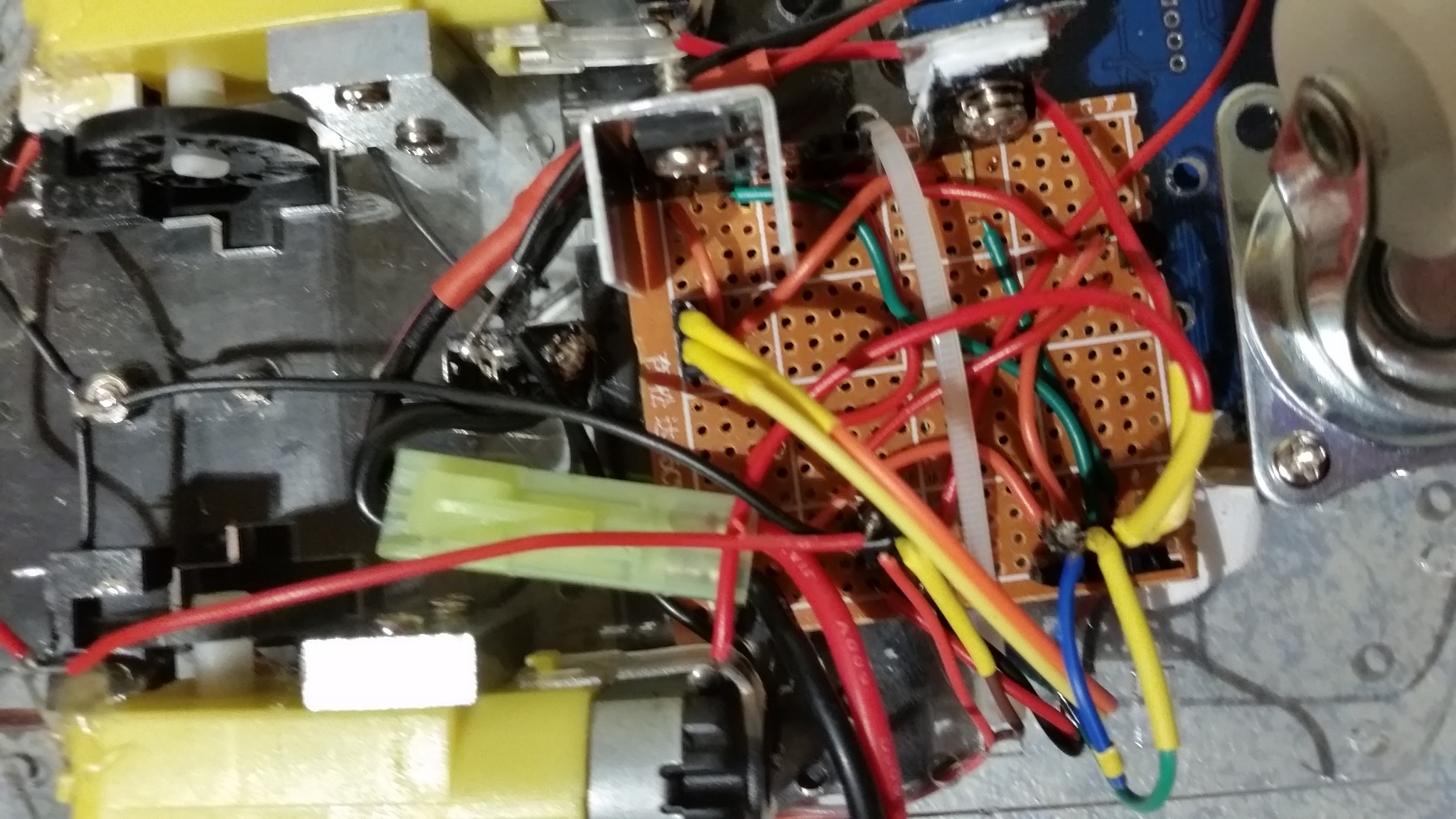
Vue de dessous du robot : la carte de contrôle des moteurs
Démonstration du mouvement du module HC-SR04