
 Notice - Introduction
Notice - Introduction
Le thème de notre TPE est celui de l’écholocalisation, ou écholocation. Nous avons, pour mêler SVT et physique, décidé d’étudier le comportement d’un animal en particulier : la chauve-souris.
Nous avons décidé d’aborder dès la première séance le thème du son, puis nous avons réfléchi à un lien avec l’autre discipline imposée : les SVT. Nous avons rétréci le champ de possibilité en se limitant à l’écholocation. Nous avons ensuite cherché une manière pertinente de formuler la problématique en fonction des thèmes que nous souhaitions aborder.
Nous avons abouti à la problématique suivante : Comment la chauve-souris se localise-t-elle grâce aux ultrasons ?
Il est bien connu que la chauve-souris peut se déplacer dans le noir, et qu'elle n’utilise pas seulement ses yeux pour se repérer mais aussi des ultrasons. Cependant, la manière exacte dont elle s’y prend reste peu connue et assez évoluée, c’est pour cela que nous allons vous expliquer comment cet animal intéressant s’y prend.
Ainsi nous commencerons par étudier le son, élément essentiel de son mode de déplacement, puis comment le chiroptère l’utilise à son avantage. Nous l'illustrerons par une expérience réalisée en laboratoire et une maquette fonctionnelle : un robot.
Le TPE est rendu sous forme de site internet. Le support nous a paru intéressant car accessible par tous, et permettant de présenter différentes formes d’information : du simple texte aux tableaux complexes, en passant par les images et les animations. Il a été entièrement créé par Achille, qui l'a codé, a créé son style de mise en page et l'a téléchargé sur son site.
Achille s’est chargé de la partie physique, tandis qu’Antoine a réalisé celle sur la chauve-souris. Thomas s’est occupé des premières recherches ainsi que de compléter les deux parties au fur et à mesure du TPE. Le robot de la seconde expérience a été conçu ensemble par notre trinôme, chacun avançant ses idées. L’ensemble du projet a été principalement géré et organisé par Achille.
Les principales difficultés rencontrées, mis à part les habituelles difficultés liées au travail de groupe, ont été celles du support : les problèmes de codage, de mises à jour, sans compter le simple langage informatique ont représenté l’obstacle le plus important. La conception du robot a aussi été une source de difficultés : bien qu'étant en apparence simple, son fonctionnement nécessite des procédés complexes. Le manque d’informations précises concernant la chauve-souris et notamment son audition nous a aussi freiné dans les recherches.
Théorie basique du son : l'onde sonore
Le son
Le son est la vibration d'un fluide qui se propage sous forme d'onde : quand on veut créer une onde sonore, on fait vibrer l'air. Le son ne se propage pas dans le vide : aucun fluide n'est disponible pour vibrer.
Le son entraîne une modification infime de la pression atmosphérique.
L'amplitude de la vibration est plus ou moins importante selon le milieu
(ex: dans un gaz la vitesse du son diminue lorsque la densité du gaz augmente (effet d'inertie)
et/ou lorsque sa compressibilité (son aptitude à changer de volume sous l'effet de la pression) augmente.
Dans l'air, la vitesse du son est d'environ 340 m/s.
Le son est défini par :
- l'intensité/l'amplitude : correspond au "volume" du son.
- La fréquence : le nombre de vibrations par seconde.
- le timbre : la "forme" de la vibration.
Les ultrasons
Les ultrasons sont des ondes sonores non audibles dont les fréquences sont comprises entre 16 000 Hertz et 1 000 000 Hertz (16 kHz et 1 Mhz). Ils ont été découverts en 1883 par le physiologiste anglais Francis Galton. L'influence des nécessités de la lutte anti-sous-marine de la première guerre mondiale pousse à créer un système de sonar à ultrasons. Le physicien Paul Langevin travaille sur le premier générateur d’ultrasons qui apparaît en 1917 et est appelé le "triplet Langevin".

Paul Langevin
Une onde
Une onde ne correspond pas à un transport de matière mais d'énergie. Traduction : le son est en fait un changement de pression qui se déplace dans l’espace. Les molécules traversées se déplacent donc peu, sans migrer. Le milieu parcouru par l’onde subit alternativement des compressions et des dilatations.
Les molécules s'entrechoquent et oscillent mais tout en restant autour de leurs positions initiales, comme le présente l'animation suivante :
Animation d'une onde longitudinale
http://www.docsity.com/en/news/physics/physics-sound-visual-representation-gifs/En réalité le son se propage dans trois dimensions, les ondes sont donc des sphères.
Milieux de diffusion
Pour se déplacer le son nécessite un milieu de propagation. Tout milieu constitué de molécules (gaz, liquides, solides) représente un milieu de propagation pour le son. La vitesse du son est plus grande dans un corps qui est plus dense. De ce fait, le son dans un liquide devrait se propager plus vite que dans un gaz mais plus lentement que dans un solide.
Ceci se vérifie la plupart des fois, mais la densité n’est pas le seul facteur à entrer en jeu. La capacité du corps à se déformer et à revenir à son état initial (le module d’élasticité) du milieu traversé influe aussi sur la vitesse du son.
La vitesse de propagation des ondes est déterminée par le comportement des molécules. Elle dépend de la masse des molécules et de la distance qui les sépare. En effet, si les molécules sont lourdes, elles se déplaceront plus lentement que des molécules légères et donc le temps nécessaire à la transmission du mouvement à la molécule voisine sera plus grand, dans ce cas l'onde ira donc moins vite. A noter que la distance entre les molécules importe plus sur la vitesse de propagation que leur masse.
Entre autre, une onde se déplace plus rapidement lorsque les molécules traversées sont plus rapprochées, comme le montre le pendule de Newton où les billes misent en contact transmettent l’énergie quasi-instantanément.
La vitesse de l'onde n'est pas liée aux caractéristiques de l'onde sonore elle même mais à celles du milieu traversé. C'est à dire que dans un même milieu, tous les sons se propagent à la même vitesse.
Caractéristiques :
Fréquence
La fréquence est le nombre d’oscillations périodiques par seconde. On parlera également de la hauteur du son.
Plus la fréquence d’un son sera élevée (onde resserée) et plus le son sera aigu. A l’inverse, plus la fréquence sera basse, plus le son sera grave.
La fréquence s’exprime en Hertz (Hz), un Hertz correspondant à un nombre d'oscillations
par seconde.
Les fréquences audibles par l’être humain s’étendent de 20 à 20 000 Hz en moyenne.
En dessous de 20 Hz, il s’agit d’infrasons et d’ultrasons au-dessus de 20 000 Hz.
La fréquence peut se calculer à partir de la longueur d’onde (= la longueur d’une période, distance entre deux sommets) et la célérité du son dans le milieu traversé.
La formule étant F = C/λ
Avec λ (Lambda) en mètres
C (célérité) en m/s (340 m/s pour l’air)
F la fréquence en Hertz
440 Hz => 0.77 m = 77cm
Plus la fréquence augmente, plus la longueur d’onde diminue.
Intensité
L'intensité sonore correspond à la puissance, au volume du son. La représentation d'une onde sur un oscilloscope permet de voir son intensité par l’amplitude des courbes :

L'intensité d'une onde
Dans l'air, les variations d’intensité se traduisent par des variations de pression plus ou moins grandes. C'est à dire que si une source sonore émet beaucoup d'énergie, elle va fortement compresser les molécules se trouvant autour d'elle et cette forte compression va donner lieu à un son plus fort.
Une source sonore émet une certaine puissance, à mesure que l'onde s'éloigne de manière sphérique de la source, cette puissance totale se répartit sur une aire croissante. Quand la distance double, cette aire se multiplie par quatre. Etant donné que la puissance acoustique se mesure pour 1 mètre carré, elle se divise par quatre quand la distance à la source se multiplie par deux. La puissance sonore est donc inversement proportionnelle au carré de la distance. C'est pourquoi un son semble moins élévé avec la distance.
Le décibel (noté dB) est une autre mesure de la puissance sonore, un décibel valant 1 dixième de bel.
L’échelle des bels est une échelle dite logarithmique de base 10 (logarithme décimal). Cela signifie que monter de 3dB double la puissance émise, de 6dB multiplie par 4 le volume, de 9dB multiplie par 8 (2x2x2) le volume et ainsi de suite. De plus ajouter 10dB (1 bel) multiplie le volume par 10.
Timbre
Lorsqu’on écoute un piano et une guitare jouant une note de même hauteur (fréquence) et de même volume, on remarque évidemment que les sons ne sont pas identiques. Cela est dû aux « timbres » qui sont différents.
Théorème de Fourier :
Un son complexe peut être décomposé en une somme d’ondes sinusoïdales de fréquences et d’amplitudes données.

Théorème de Fourier
Autrement dit, un son peut-être décomposé en plusieurs ondes sinusoïdales qui sont émises simultanément. Celles-ci additionnées donnent une seule onde, cette résultante est donc l’onde du son obtenu. Ces dernières sont appelées harmoniques.
Un son pur est le plus simple qui puisse exister. Il s’agit d'un son dont l’onde est parfaitement sinusoïdale. Et donc qui est démunie d’harmoniques. On ne trouve pas de tel son dans le nature, seul un appareil électronique peut générer ce type de son.

La fonction sinusoïdale
Toutes les ondes ne sont cependant pas composées d’une fondamentale et d’harmoniques. Certaines semblent être aléatoires puisqu’elles ne sont pas composées uniquement d’harmoniques et de ce fait ne semblent pas périodiques. Leurs hauteurs exactes ne peuvent être appréciées par l’oreille. C’est le cas de bruits irréguliers comme un claquement de porte pour un bruit impulsif ou une tondeuse pour un bruit prolongé.
Effet Doppler
L'effet Doppler est le décalage de fréquence d’une onde (onde mécanique, acoustique, électromagnétique...) entre la mesure à l'émission et la mesure à la réception lorsque la distance entre l'émetteur et le récepteur varie au cours du temps.
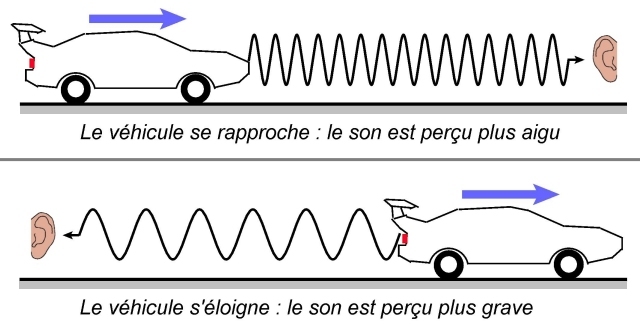
L'effet Doppler
Lorsque la source sonore se rapproche, la fréquence augmente et quand la source s'éloigne, la fréquence diminue.
Pour un observateur immobile (référentiel terrestre), le bruit émis par une voiture n’est pas le même lorsqu'elle s’approche que lorsqu'elle s’éloigne.
Quand la voiture se rapproche, le son paraît plus aigu que le son perçu par le conducteur. Quand elle s’éloigne, le son paraît plus grave. C’est une manifestation de l’effet Doppler.
Cet effet n'a que peu d'impact sur la chauve souris, car elle se déplace trop lentement.
La réflexion d'une onde (ou l'écho)
Un écho est le retour vers son émetteur d'un son réféchi par un obstacle.
Lorsqu’on schématise cette situation, l’angle de réflexion (ici i’) est égal à l’angle d’incidence (ici i).
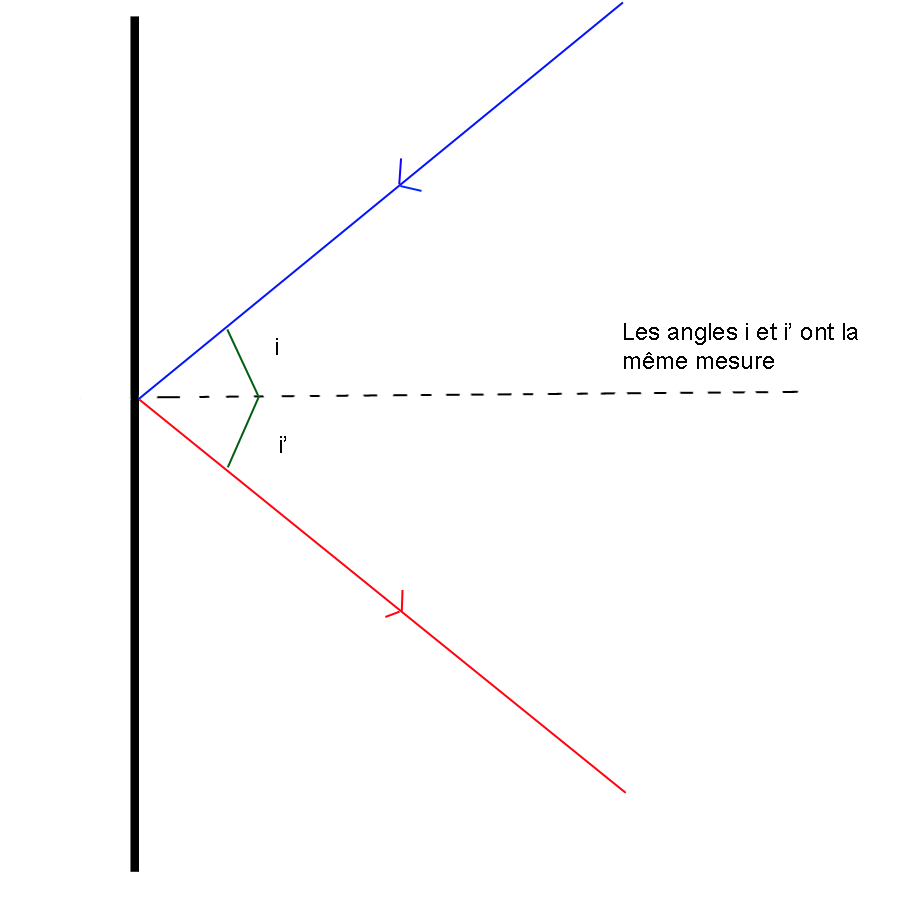
Représentation de la réflexion d'une onde contre un obstacle
Il faut que l'émission soit perpendiculaire à l'obstacle pour que l'émetteur (qui est aussi le récepteur) puisse entendre le retour, ou que l'obstacle ait une partie perpendiculaire au "rayon" du son (comme un cylindre)
Le son ayant une vitesse limitée (vu plus haut) de 340 m/s dans l'air, il y a un court temps entre l'émission et la réception au même endroit d'un son. L'équation T(temps en s) = D(distance en m)/V(vitesse en m/s)
Nous pouvouns donc utiliser l’écho pour calculer une vitesse. La méthode est la suivante : une son est émis. Lorsqu’il rencontre un obstacle, son écho revient vers l’émetteur. En connaissant la vitesse de propagation du son (340 m/s) ainsi que on délai de retour, on peut calculer la distance de l’obstacle. (voir l'expérience n°1)
Une partie de l'onde est absorbée dans le matériau. Plus le matériau est dense, plus l'onde sera réfléchie. Un matériau poreux absorbera plus les ondes sonores qu'un matériau "normal".
La chauve-souris
Quelques bases sur la chauve-souris
Pendant des siècles, on s’est interrogé sur la façon dont elles sont capables de s’orienter dans le noir : est-ce grâce à une vision exceptionnelle ou à un sens totalement différent ? Le premier à tenter de résoudre ce mystère est un abbé italien de la fin du 18ème siècle : Lazzaro Spallanzani.

Lazzaro Spallanzani, biologiste italien du XVIIIè siècle
Fonction des ultrasons
Dans beaucoup de cas, l’utilisation de hautes fréquences confère un considérable avantage pour la communication et encore plus dans l’écholocation. Les chauves-souris sont capables d’exploiter les principes de la physique, en ayant recours par exemple à l’effet Doppler, et subissent les mêmes contraintes naturelles que les systèmes sonars fabriqués par l’homme.
Emission
Expliquons tout d’abord très rapidement le principe de l’écholocation. La chauve-souris émet un ultrason par ses cordes vocales et qui sort par la bouche ou le nez. Dès que cet ultrason rencontre un obstacle (proie, végétation...), il rebondit vers la chauve-souris. Celle-ci capte l’écho grâce à ses oreilles, son cerveau va alors calculer la distance, la vitesse, la position et la forme de l’objet détecté. Tout cela a lieu en une fraction de seconde. Il arrive que les chauves-souris émettent des cris audibles par l'homme, il ne s'agit alors évidemment pas d'ultra-sons, mais de cris que l'on qualifie de «cris sociaux», c'est-à-dire des cris qui sont utilisés par les chauves-souris pour communiquer entre elles (territorialité, agressivité, parade nuptiale, cri d'appel d'un jeune à sa mère, ...)
Toutes les chauves souris n'émettent pas des ultrasons de la même manière. Le type de cri varie en fonction des espèces et de la situation. Par exemple, en chasse, la chauve-souris émet plus fréquemment afin de pouvoir suivre sa proie avec précision, d'estimer sa taille et sa vitesse. Certaines chauve-souris émettent dans les fréquences audibles pour l'homme.
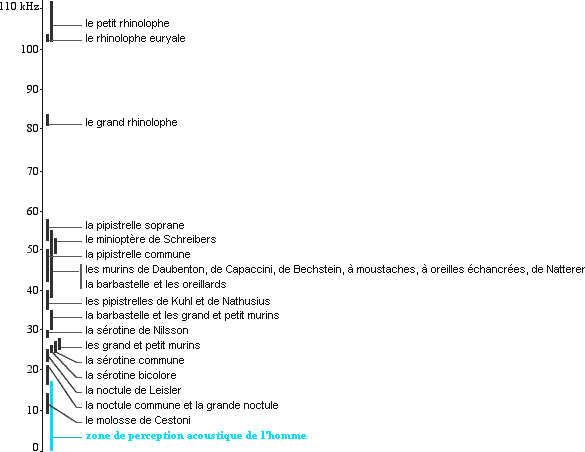
Diagramme des fréquences d'émission des chauves-souris pour différentes espèces
Réception et traitement des Informations
Les oreilles des chauves-souris sont adaptées à leur mode d’audition particulier. Comme chez la plupart des mammifères, la cochlée contient une membrane qui va propager les vibrations engendrées par l’arrivée d’ondes sonores sur le tympan. Ces vibrations vont stimuler les cellules ciliées de cette membrane qui vont à leur tour activer les cellules du ganglion spiral, le nerf auditif et enfin le cortex auditif. La fréquence de décharge dans les fibres du nerf auditif est proportionnelle à l’amplitude du son, c’est-à-dire que plus l’écho est intense, plus cette fréquence de décharge va être élevée. La durée des échos et les intervalles entre ceux-ci sont décryptés par le cerveau par la manière dont se succèdent les signaux nerveux qu’il reçoit. La fréquence des échos, enfin, est codée par les cellules de la membrane basilaire contenue dans la cochlée : la cochlée contient un liquide qui stimule les cellules basilaires au rythme des vibrations.
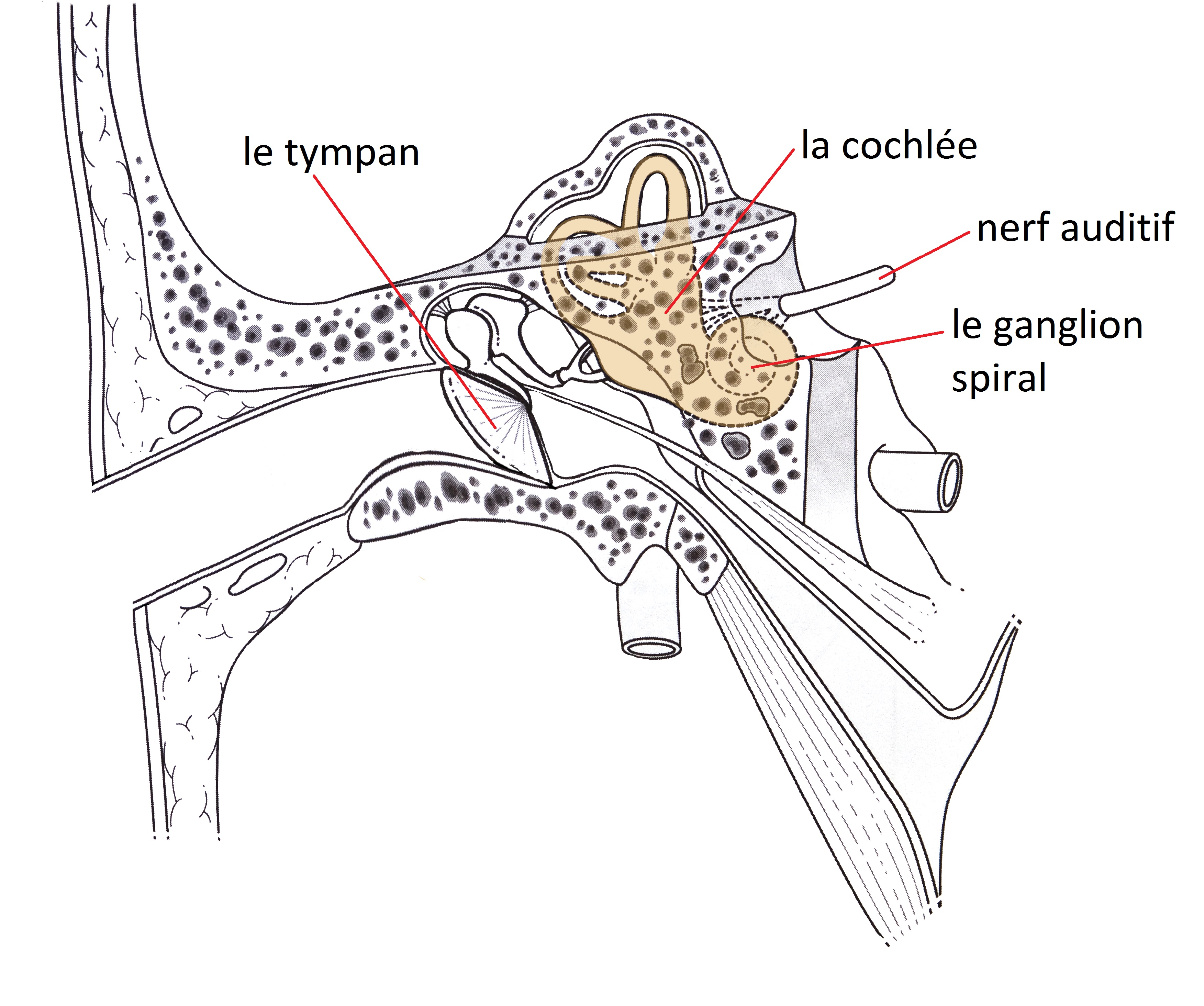
L'oreille interne de la chauve-souris
Pourquoi plusieurs animaux utilisent des ultrasons plutôt que des sons «ordinaires» comme la majorité des animaux ?
- Hypothèse 1 : La première réponse possible conteste la question en pointant le fait qu’elle n’est due qu’à une vision anthropocentrique. L’audition humaine normale débute vers 2 kHz pour décliner progressivement dans les hautes fréquences jusqu’à 20 kHz. Le spectre audible des autres mammifères, quant à lui, a généralement la même dispersion mais pour des fréquences supérieures. Le spectre audible maximum des chauves-souris s’étend d’environ 20 kHz à 120 kHz. Il n’est donc pas surprenant que certains mammifères utilisent des ultrasons.
- Hypothèse 2 : Pourquoi utiliser les sons "ordinaires" ? Pour les petits animaux, en effet, les ultrasons sont faciles à produire, à transmettre et à recevoir. Ce sont les basses fréquences qui sont difficiles à produire pour eux, principalement parce qu’elles nécessitent des structures corporelles importantes (le son le plus grave enregistré dans le monde animal est produit par la baleine).
- Hypothèse 3 : Les propriétés des ultrasons donnent aux animaux qui les utilisent plusieurs avantages exploitables. La seule différence réelle entre les ultrasons et les sons «normaux» est que l’air absorbe plus les hautes fréquences, d’ailleurs, cet effet est amplifié au-delà de 20 kHz et dépend aussi du taux d’humidité du milieu.
Perturbations liées à l'environnement
Le milieu peut être ouvert (prairies...), dans ce cas, les chauves-souris chassent des insectes en vol sans être gênées par les échos de la végétation. Elles peuvent aussi chasser en lisière de la végétation, se nourrissant d’insectes en vol, ou à la surface de l’eau (qui agit comme un miroir pour l’écho si l’eau est calme), mangeant des poissons. Enfin, le milieu peut être dense, avec beaucoup de végétation. Dans ce dernier milieu, on distingue deux stratégies de chasse différentes adoptées par les chauves-souris : certaines vont attraper la nourriture sur une surface (au sol, sur une branche...), d’autres détectent les battements d’ailes des insectes et les capturent en vol. Mais beaucoup de chauves-souris ne chassent pas que dans un seul type d’habitat. On observe tout de même qu’elles vont plutôt vers des habitats présentant moins de perturbations que celui dont elles viennent. Les cris d’écholocation sont différents selon le type d’habitat, pour s’adapter aux différents problèmes à résoudre comme l’écho de la végétation perturbant celui de la proie.
Expérience 1 : les ultrasons
Peut-on mesurer la distance grâce au son ?
Liste de matériel 1 :
- 1 oscilloscope
- 1 générateur TBF
- 1 émetteur d'ultrasons
- 1 récepteur d'ultrasons
- 1 règle d'1m
Protocole 1 : Vérifier le bon fonctionnement du montage
Le temps à trouver est 0,001s = 1ms
- Placer l'émetteur et le récepteur à une distance de 34cm l'un de l'autre à l'aide de la règle.
- Relier ces deux éléments à un oscilloscope.
- Actionner l'émetteur grâce à un générateur TBF qui lui sera relié et réglé sur "discontinu"
- Calibrer d'oscilloscope afin de voir au moins 2 émissions d'ultrasons
- Grâce à l'oscilloscope, mesurer le temps écoulé entre l'émission et la réception du signal
- Vérifier l'équation suivante :
d = v / t
t = d / v
t = 0,34 / 340 //Avec t le temps mesuré.
Liste de matériel 2 : voir n°1
Protocole 2 : Trouver la distance grâce au son (un écho)
- Placer l'émetteur et le récepteur à une distance inconnue mais <1m l'un de l'autre
- Relier ces deux éléments à un oscilloscope.
- Actionner l'émetteur grâce à un générateur TBF qui lui sera relié et réglé sur "discontinu"
- Calibrer d'oscilloscope afin de voir au moins 2 émissions d'ultrasons
- Grâce à l'oscilloscope, mesurer le temps écoulé entre l'émission et la réception du signal
- Vérifier l'équation suivante :
d = ( v * t ) / 2 // divisé par 2 car l'onde sonore fait un aller-retour
d = ( 340m/s * t ) / 2 // avec t le temps mesuré.
Vérifier le résultat avec la règle.
Peut-on utiliser les ultrasons pour calculer une distance avec précision (+- 1cm) ?
Compte rendu de l'éxperience n°1 :
Protocole 1 :
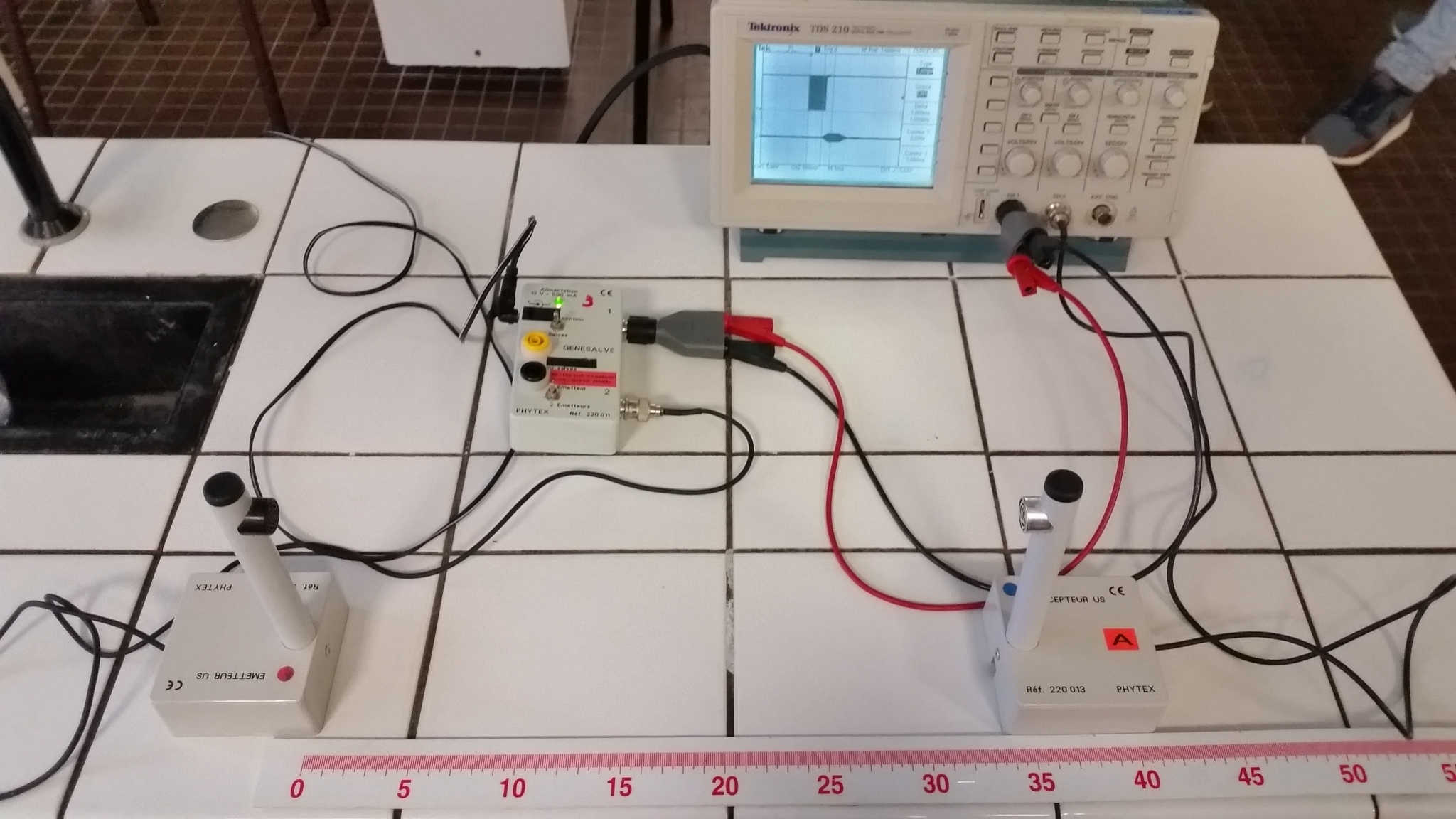
Montage du protocole 1, avec les émetteur et récepteur à 34cm l'un de l'autre
L'émetteur et le récepteur sont à une distance de 34cm l'un de l'autre. Ces deux éléments sont reliés à un oscilloscope. Actionner l'émetteur grâce à un générateur TBF qui lui sera relié et réglé sur "discontinu". L'oscilloscope est calibré afin de voir au moins 2 émissions d'ultrasons. Le temps mesuré entre l'émission et la réception du signal est de 1ms (voir figure suivante)
Le temps à trouver étant de 0,001s = 1ms, l'éxperience est un succès.
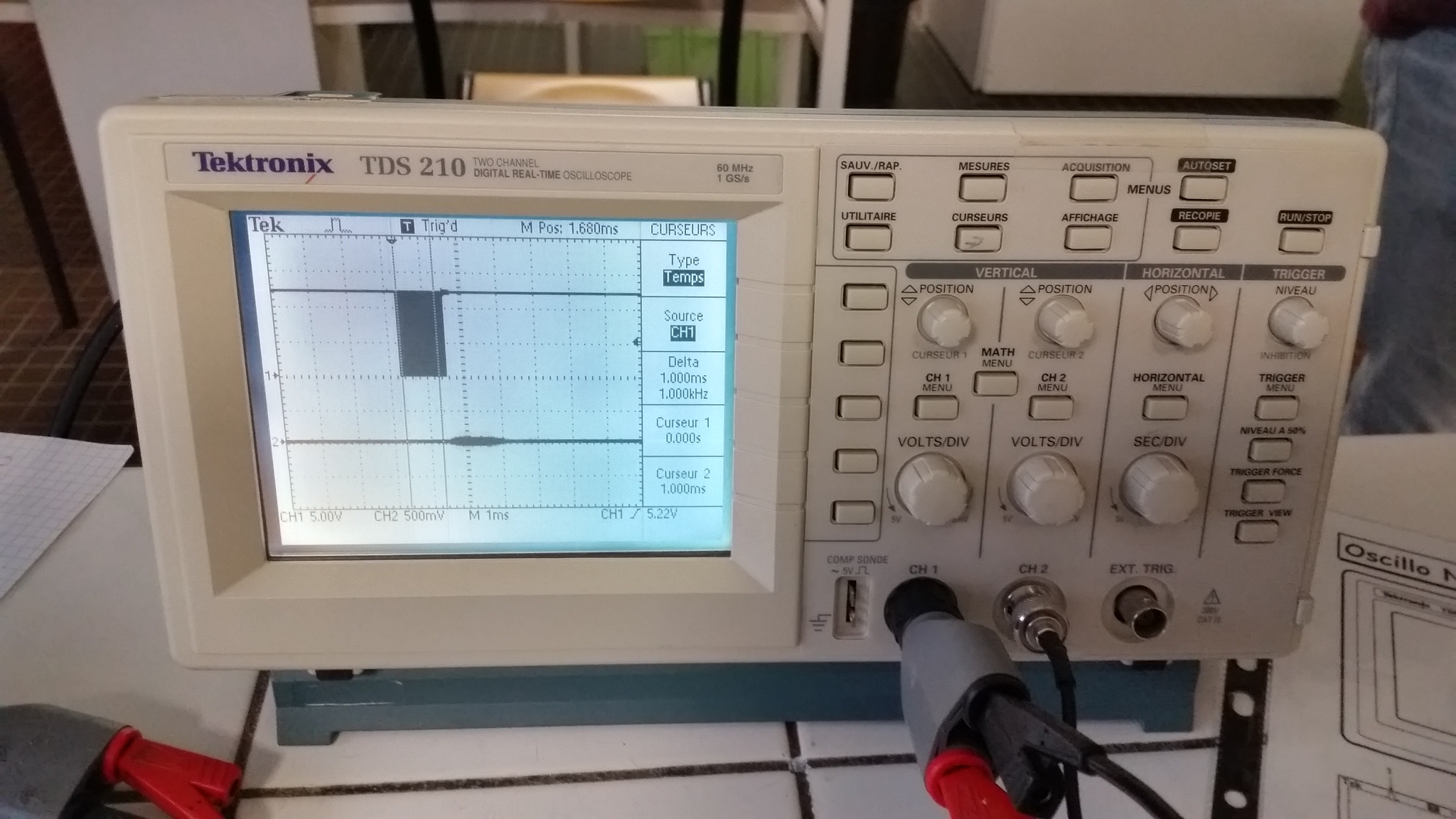
Oscilloscope affichant le temps entre l'émission et la réception pour une distance de 34cm
Protocole 2 : Mesurer une distance avec un écho
L'émetteur et le récepteur sont à une distance inconnue mais <1m l'un de l'autre, et reliés à un oscilloscope. Calibrer d'oscilloscope afin de voir au moins 2 émissions d'ultrasons. Le temps écoulé entre l'émission et la réception du signal est de 1.520ms (voir figure n°2)

Montage du protocole 2 : une paroi rigide est utilisée pour générer un écho.
Vérifier l'équation suivante :
d = ( v * t ) / 2 // divisé par 2 car l'onde sonore fait un aller-retour
d = ( 340m/s * 0.00152 s ) / 2 // avec t le temps mesuré.
d = 0.2584 m = 26cm environ
Ce résultat est vérifié à l'aide d'une règle.
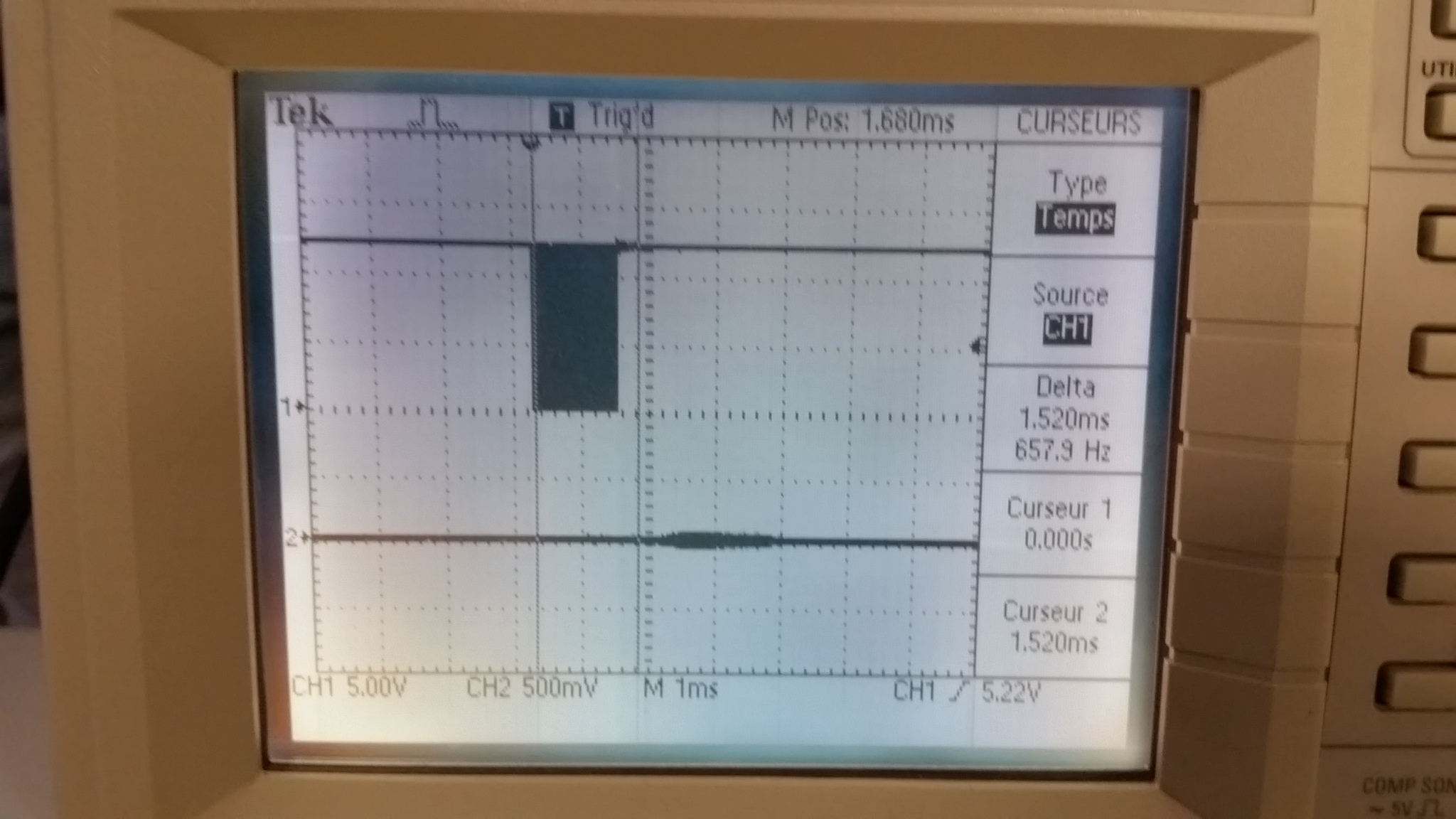
Vue de l'écran de l'oscilloscope. Le temps entre l'émission et la réception de l'onde sonore est de 1.520ms.
Le résultat est vérifié, l'expérience est donc un succès.
Conclusion
Peut-on utiliser les ultrasons pour calculer une distance avec précision (+- 1cm) ?
D'après les précédents résultats, nous pouvons affirmer pouvoir mesurer une distance sans mètre et automatiquement à l'aide des ultrasons.
La vitesse du son dans l'air étant constante, le son étant une onde sonore et obéissant donc à certaines lois, il est possible, avec un organisme adapté, de se situer grâce aux ondes sonores (incluant les ultrasons)
La précision de ce système est de l'ordre du cm, ce qui est suffisant pour nos besoins.
Concrètement, notre utilisation de cette propriété
Nous utilisons cette propriété à travers un module pour carte arduino : le module HC-SR04

Module HC-SR04
Source de l'imageCe module est un périphérique créé pour fonctionner avec une carte Arduino (voir expérience 2). Il est composé d'un émetteur et d'un récepteur d'ultrasons à 40KHz. Il envoie à la carte arduino le délai entre l'émission et la réception des utltasons qu'ils envoie par rafales. Ainsi cette dernière peut calculer la distance en temps réel, et agir en conséquence.
Expérience 2 : le robot
Présentation
Notre seconde expérience consiste en la fabrication d’un robot simple qui reproduit le moyen de localisation de la chauve-souris.
Ainsi nous reprenons d’une part ce sens des chauves-souris créé pas la nature et l’illustrons, et d’autre part les principes physiques exploités par cette technique, puisque nous recréons entièrement ce système nous-mêmes.
Ce robot et cette partie seront le thème majeur de l'oral et y seront donc exposés de manière précise et détaillée. Vous pouvez lire ici le compte rendu simplifié de cette expérience.
Explication
Pour simplifier, le robot ne se déplace que sur deux axes : il ne vole pas. C’est un robot qui se déplace au sol grâce à deux roues motorisées indépendantes. Ces deux roues, ainsi que l’intégralité du robot, sont contrôlés par un système autonome : une carte Arduino.
Une carte Arduino est un outil électronique programmable qui peut contrôler des périphériques.
Le robot est composé de plusieurs éléments pour modéliser la chauve - souris :
- Le module à ultrasons vu dans la partie précédente modélise les cordes vocales et les oreilles de la chauve-souris.
- Les moteurs et roues modélisent le moyen de déplacement de la chauve-souris.
- La carte Arduino commande tous les éléments, elle modélise le cerveau de la chauve-souris.
- Le châssis contient tous les composants.
Fonctionnement basique
Une version simplifiée du fonctionnement du robot serait la suivante : le robot détecte des obstacles contre lesquels il pourrait potentiellement se heurter en mesurant la distance qui l’en sépare grâce à des ultrasons. Il réagit en conséquence et change de direction lorsqu’il détecte un tel objet.
Illustration
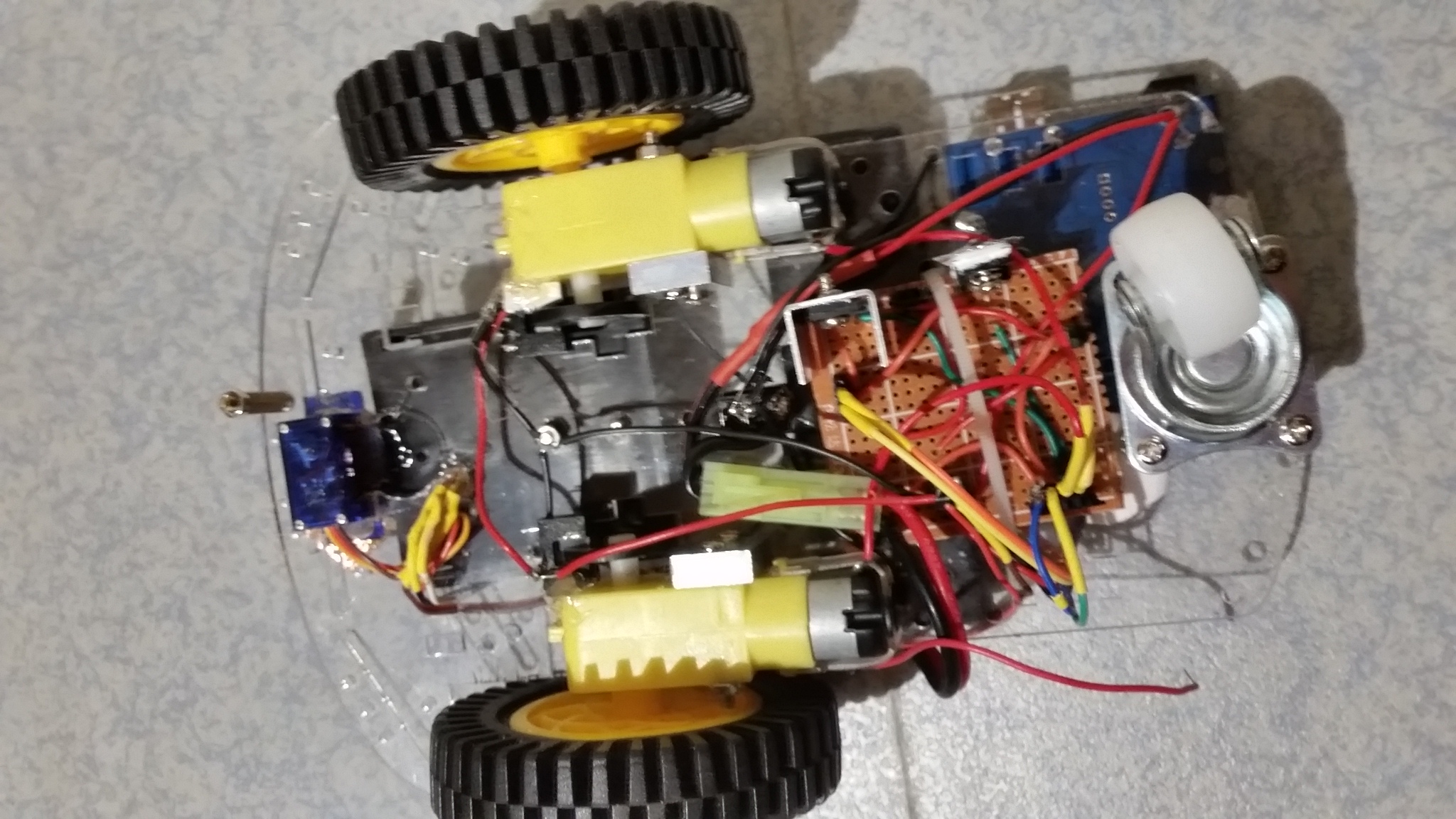
Voici ci-dessous des images dudit robot :
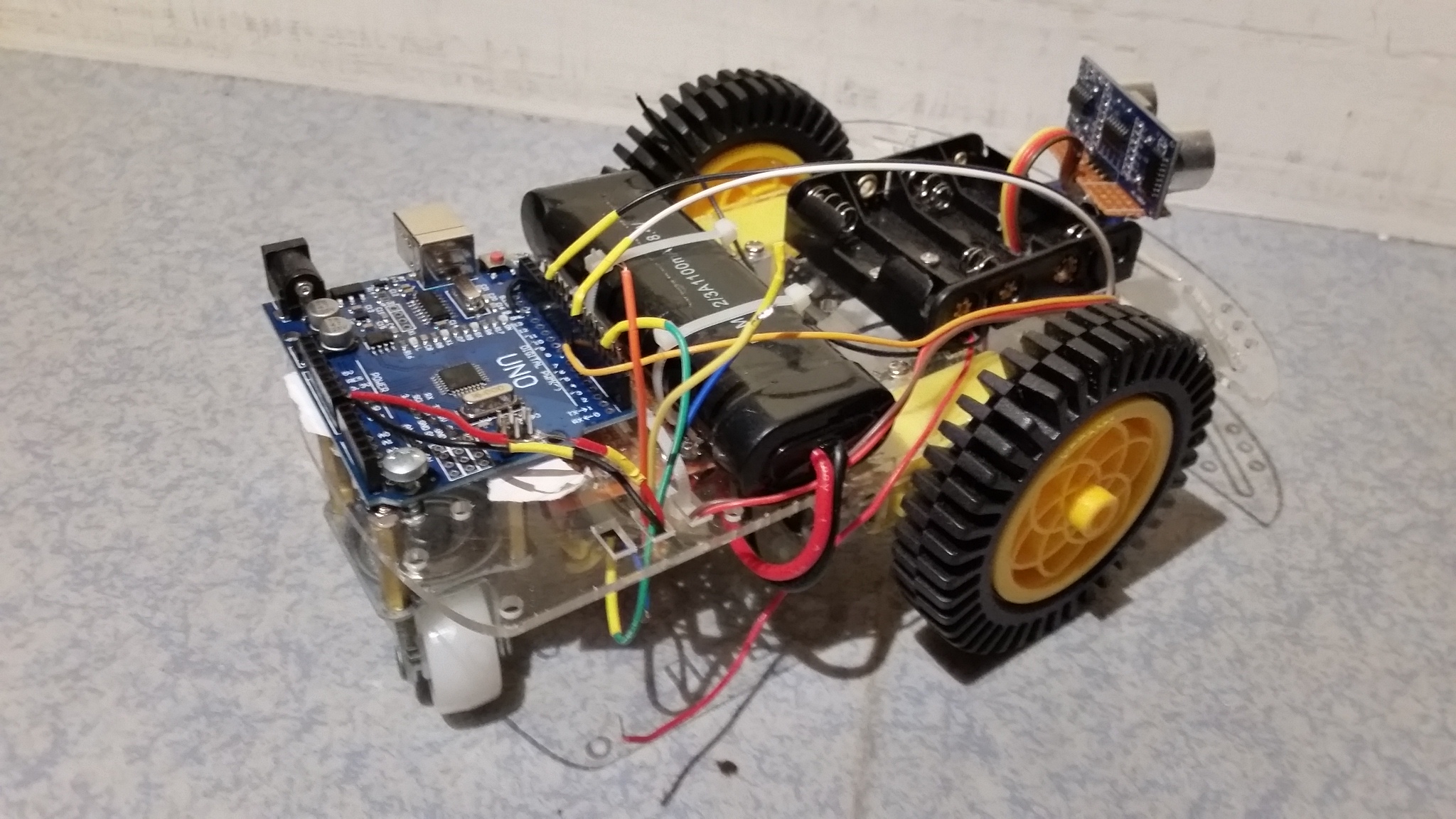
Vue générale du robot
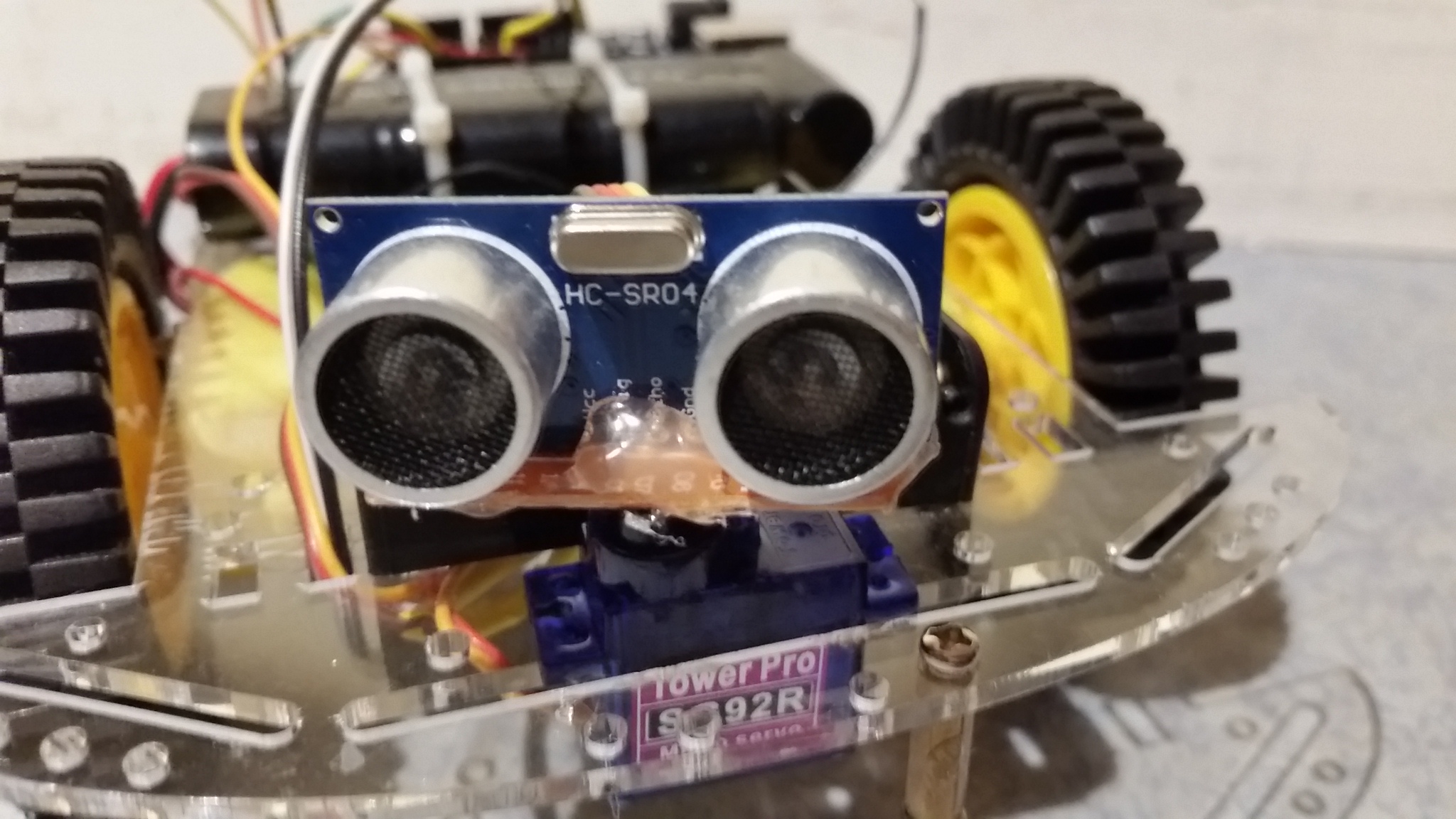
Le module HC-SR04 monté sur le robot
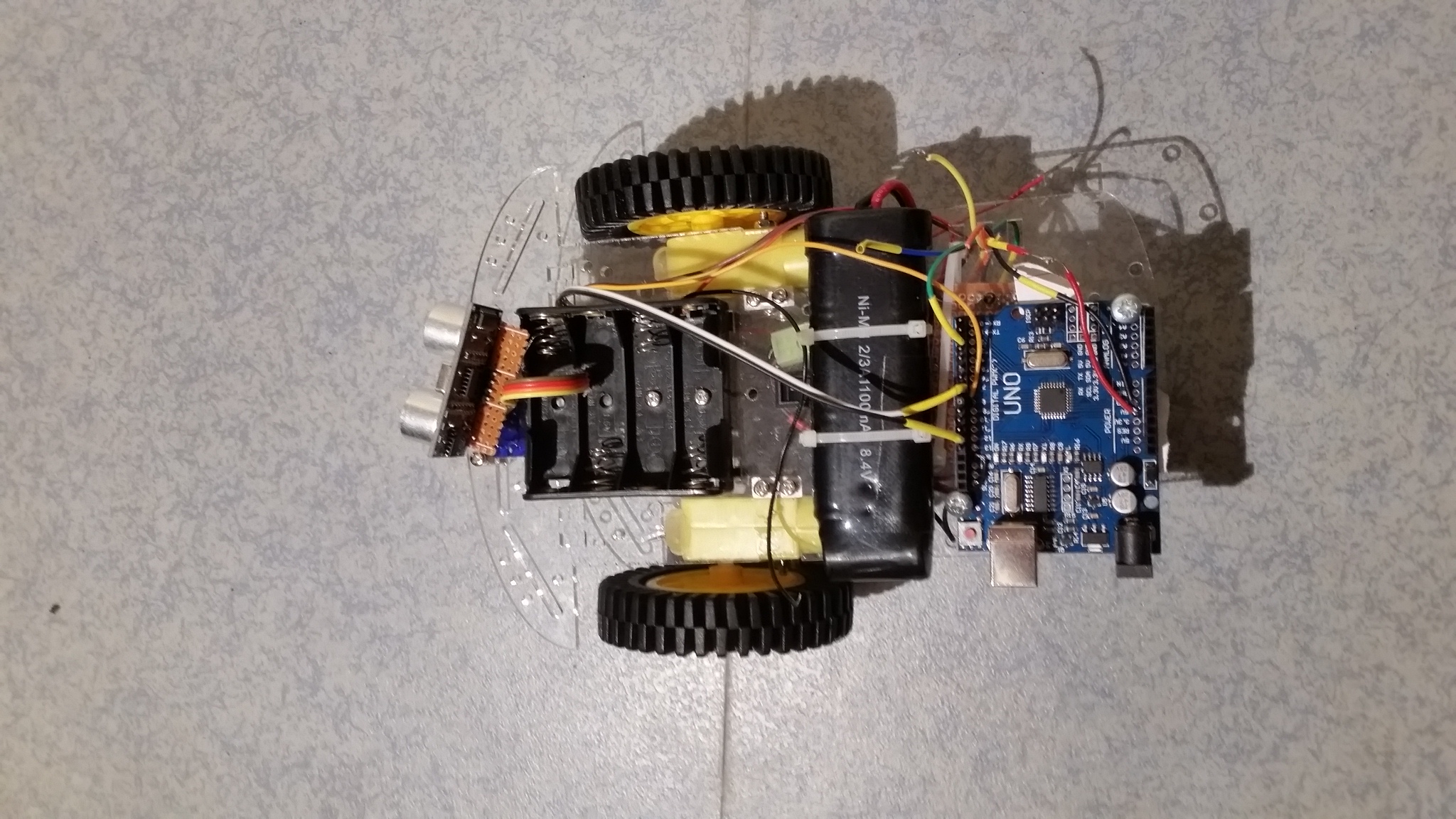
Vue de l'organication générale des composants sur le robot
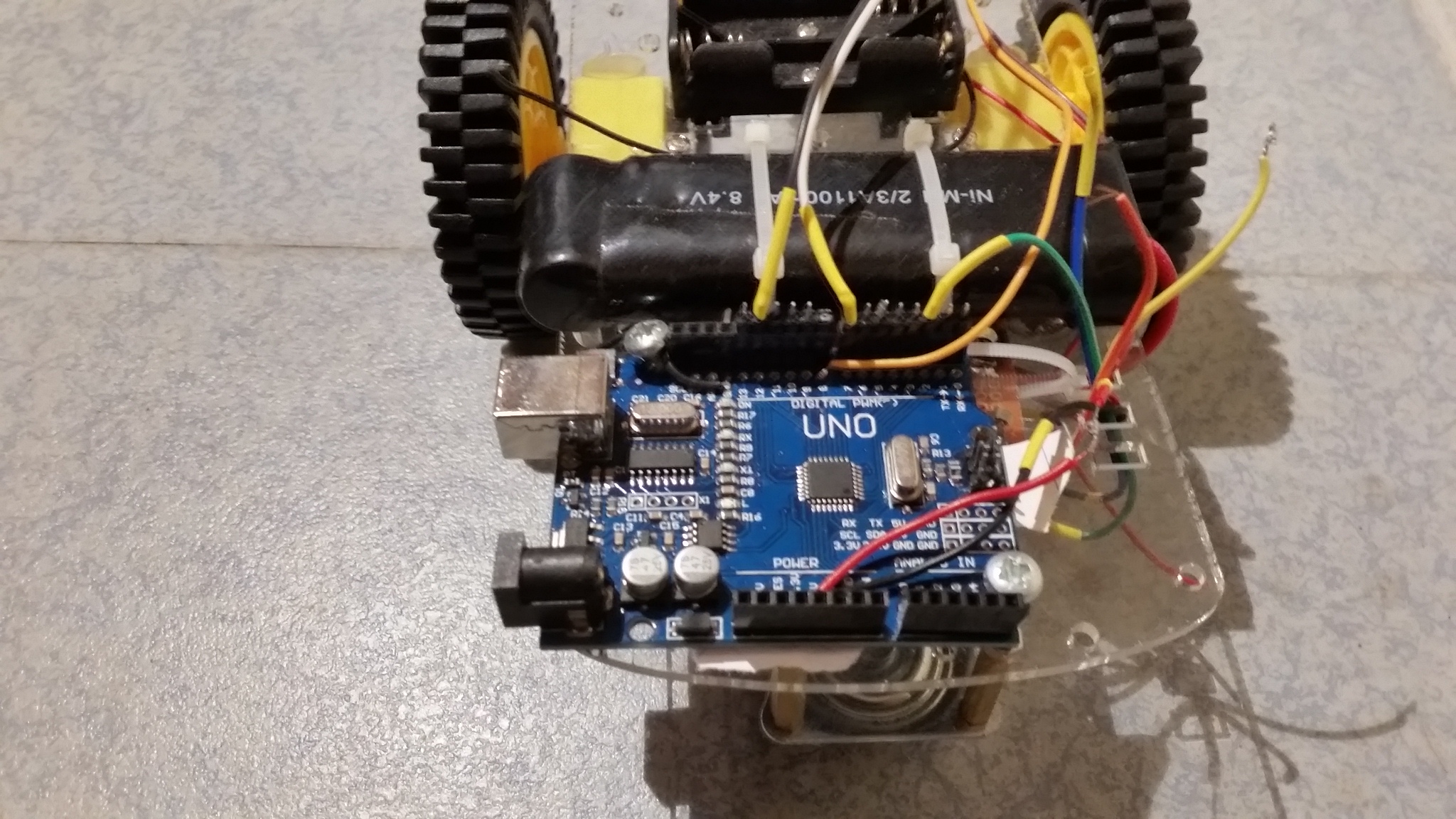
La carte Arduino UNO
Montage du protocole 1, avec les émetteur et récepteur à 34cm l'un de l'autre
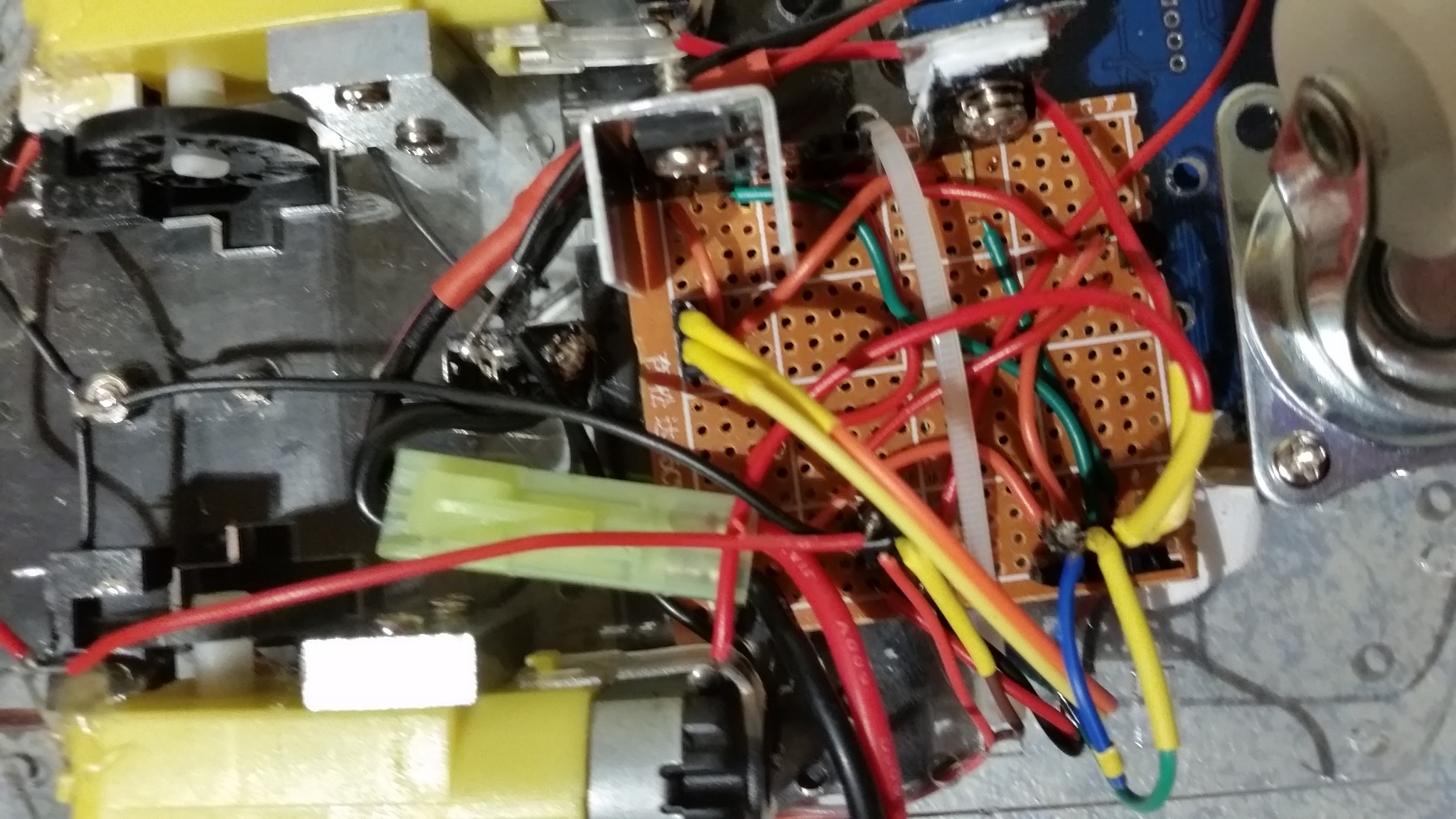
Vue de dessous du robot : la carte de contrôle des moteurs
Démonstration du mouvement du module HC-SR04
Conclusion
Conclusion
Nous pouvons donc désormais affirmer qu’il est théoriquement possible de se déplacer uniquement à l’aide du son, et que certains animaux comme par exemple la chauve-souris peuvent l’effectuer.
A l’issue de ce TPE, nous présenterons un robot évitant les obstacles se déplaçant à l’aide du même phénomène : l’écholocation.
Sources
| Nom du site | Editeur/Auteur | Date d'édition ou de mise à jour | Adresse du site |
|---|---|---|---|
| Vigienature | Pauline VAN LAERE | 2007 - 2008 | http://vigienature.mnhn.fr |
| Matterwaves | Gabriel LaFreniere | juin-11 | http://matterwaves.info/ |
| Docsity | Docsity | 2014 | http://www.docsity.com/en/news/physics/physics-sound-visual-representation-gifs/ |
| Deuns | Deuns | Non spécifié | http://deuns.chez.com/sciences/ondes/ondes3.html |
| Banggood | Banggood | 2016 | http://www.banggood.com/fr/ |
| Wikipédia | Communauté | 2016 | https://fr.wikipedia.org |